康复机器人是一种典型的人机交互系统。关于康复机器人的研究已积累了大量关于机器人结构、智能控制等与“机”相关的技术成果,但缺少对于“人”特别是“患者”相关的人体特性研究。康复机器人系统的智能化研究不仅是机器人的“人工智能”,还应该包括对系统中“人”的“生命智能”的研究。康复机器人系统的服务主体是神经损伤患者,深入开展以人为中心的研究是一件归本溯源的工作,也是创新机器人辅助康复技术的依据和基础。因此,如何深入理解人体运动学习影响因素并发展新型机器人辅助康复理论和训练策略是该领域面临的重大挑战。
中国科学院宁波材料技术与工程研究所所属慈溪生物医学工程研究所运动康复与医用机器人技术团队主要围绕脑卒中与神经退行性疾病等引发的运动、认知、言语等功能障碍,开展神经重塑与功能康复技术的研究与产业化应用,包括从认知神经科学角度开展以功能重建为目的信息-认知-行为即“思行合一”康复机制的基础性研究。
科研团队通过视、听、触力觉等多感觉虚拟现实康复训练、多模态人体运动意图识别、人机协调与柔顺控制等多项“思行合一”神经重塑关键技术的深入研究与系统集成,为神经损伤疾病(如脑卒中等)患者提供大量的、可重复的、功能导向性康复训练与在线功能评估系统,帮助患者重塑大脑皮层功能、恢复肢体或言语功能。
针对思行合一机制的基础研究,团队自主研发了可定制的“多感觉融合”虚拟现实与“按需辅助”康复机器人训练平台,配备了专业的人体姿势捕捉与运动特性分析、脑肌电采集与分析、近红外脑功能成像等科研设备,为开展多感觉融合诱导下认知-运动功能的变化规律与“康复”影响因素研究提供有力支撑。提出了基于人机交互做功估计与自适应衰减因子的康复机器人控制新策略,合理利用奖惩机制动态调整机器人辅助策略以激发用户主动康复的意愿与潜能(如图1所示)。(《中国康复医学》, 2021, 采用;International Journal of Advanced Robotic Systems, 2020, 17(5);《生物医学工程学杂志》, 2020,37(1):129-135;《中国康复理论与实践》, 2019, 25(2):217-223.)
在解决临床需求方面,针对卒中患者运动与认知功能障碍康复,团队自主研发了“运动意图识别与主动康复”关键技术及产品——末端牵引式上肢康复训练系统。在获得的1200万元天使基金的资助下,积极开展技术转移转化,项目产品在全国三甲医院开展多中心临床试验研究,结果表明“思行合一”主动康复技术可替代传统人工康复(《华西医学》,2020, 35(5):563-567.)。该产品已于2021年1月15日获得CFDA第二类医疗器械注册认证证书。
针对神经退行性疾病患者的行走失衡与冻结步态症状,团队通过对起步运动中视觉诱导的神经调控机制的研究,发现了节律性视觉引导可以促进步态的规整化,进而有望改善冻结步态的规律(如图2所示),在此基础上开发了面向冻结步态症状缓解的增强现实眼镜系统,其初步效果得到了多家医院的临床验证,约对70%的患者有症状改善的效果。团队正在开展神经信号特征与调控机制研究(Neuroscience Letters, 2021, accepted),初步的研究表明,冻结步态的发生与患者认知资源的不足有关,这为开发此类疾病的“思行合一”主动康复技术、改善患者生活质量提供了基础。
以上研究获得了中科院STS双创引导专项(KFJ-STS-SCYD-11)、浙江省重点研发计划(2019C03090)、宁波市社发科技重大专项(2016C11021)等项目的支持。
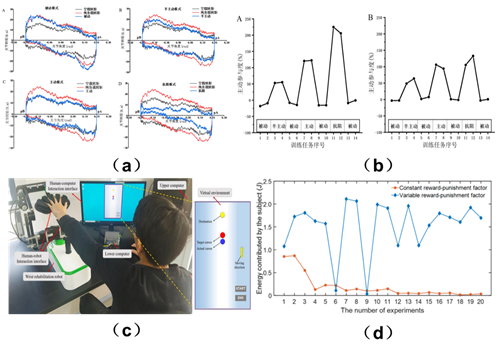
图1 “按需辅助”康复机器人控制策略的效果验证与定量化上肢功能评估技术应用。(a)基于使用者“做功”能力的机器人交互力矩估算;(b)基于交互特性的上肢功能评估与基于肌电的功能评估的对比验证;(c)基于遗忘因子自适应衰减的“按需辅助”及其在手部康复机器人中的应用;(d)不同奖惩因子条件下的上肢运动能力特性
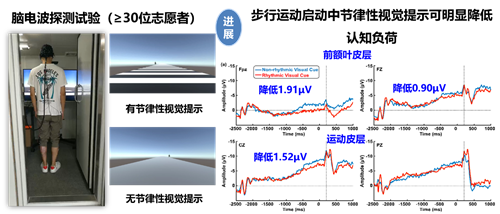
图2 基于多导脑电波的特征电位检测试验表明节律性视觉提示可明显降低人体步行启动过程的认知负荷
(慈溪医工所 左国坤 施长城)
原文链接:http://www.nimte.ac.cn/news/progress/202103/t20210305_5970629.html